
Э”лҠҫҖВ·іэұщҷCЖчИЛРРһйҝШЦЖСРҫҝ
НхТ«ДПЈ¬ЦЬФӯБҰЈ¬ЧTЎЎАЪЈ¬—оТЧьШ
әюДПҙуҢW(xuЁҰ)лҠҡвЕcРЕПў№ӨіМҢW(xuЁҰ)ФәЈ¬әюДПйLЙі
ХӘЎЎЎЎЎЎТӘЈәҪйҪBБЛЭ”лҠҫҖВ·іэұщҷCЖчИЛөДСРҫҝ¬F(xiЁӨn) оЎЈбҳҢҰЖд№ӨЧчӯh(huЁўn)ҫіҗәБУЎўІ»ҙ_¶ЁТтЛШ¶аөДМШьcЈ¬МбіцБЛ»щУЪсR –ҝЙ·тӣQІЯөДРРһйҝШЦЖЖчөДФO(shЁЁ)УӢ·Ҫ·ЁЎЈФ“·Ҫ·ЁКЧПИ¶ЁБxБЛЭ”лҠҫҖіэұщҷCЖчИЛөДсR –ҝЙ·тДЈРНЈ¬И»әуҪoіцБЛПа‘Ә(yЁ©ng)өДЭ^ғһ(yЁӯu)·Ҫбҳ?biЁЎo)СЛчІЯВФЈ¬ЯҖҪoҝШЦЖЖчМнјУБЛёЕВКХ{(diЁӨo)№қ(jiЁҰ)ҷCЦЖЈ¬ТФЯ_өҪҲМ(zhЁӘ)РРР§№ы·ҙрҒөДДҝөДЎЈһйҪвӣQҷCЖчИЛЧчҳI(yЁЁ)ЦРөДН»°l(fЁЎ)ЗйӣrЈ¬ФЪФ“·Ҫ·ЁЦРЯҖТэИлБЛИЛ№ӨЭoЦъәНРРһйҢW(xuЁҰ)Б•(xЁӘ)ҫW(wЁЈng)Ҫj(luЁ°)ЎЈҪoіцБЛҝШЦЖЖчЕР”аҷCЖчИЛРиТӘЙкХҲИЛ№ӨЭoЦъөДЛг·ЁЎЈФЪИЛ№ӨЭoЦъЯ^іМЦРЈ¬НЁЯ^РРһйҢW(xuЁҰ)Б•(xЁӘ)ҫW(wЁЈng)Ҫj(luЁ°)Ј¬ҷCЖчИЛҝЙТФҢW(xuЁҰ)Б•(xЁӘ)ИЛ№ӨЭoЦъЦРІЩЧчҶTөД„УЧчЈ¬ІўАыУГ¬F(xiЁӨn)УРРРһйНкіЙёьјУҸН(fЁҙ)лsөДРВИО„Х(wЁҙ)ЎЈҢҚтһұнГчФ“·Ҫ·ЁІ»ө«ҝЙТФёщ“ю(jЁҙ)ҷCЖчИЛөД о‘B(tЁӨi)ТҺ(guЁ©)„қіцЭ^ғһ(yЁӯu)„УЧчЈ¬ЯҖҝЙТФФЪҫҖёьРВҝШЦЖІЯВФЈ¬ҫЯУРәЬҸҠөДм`»оРФәНф”°фРФЎЈ
кP(guЁЎn)ЎЎжIЎЎФ~ЈәЭ”лҠҫҖВ·іэұщҷCЖчИЛЈ»РРһйҝШЦЖЈ»сR –ҝЙ·тӣQІЯЈ»РРһйҢW(xuЁҰ)Б•(xЁӘ)ҫW(wЁЈng)Ҫj(luЁ°)Ј»ИЛ№ӨЭoЦъ
ЈұЎЎТэЎЎСФ
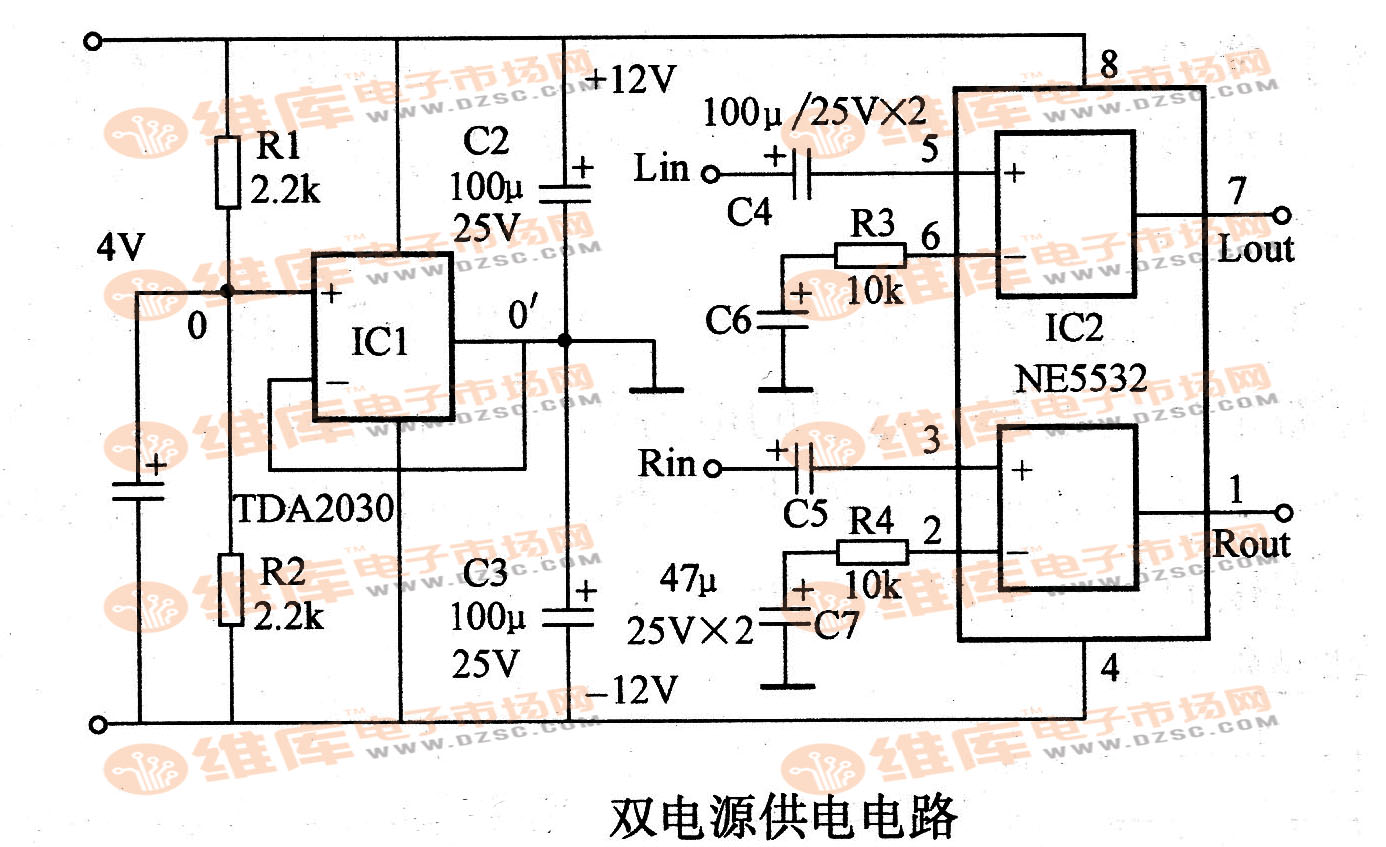
ОТҮшКЗЭ”лҠҫҖВ·ёІұщЭ^ҮА(yЁўn)ЦШөДҮшјТЦ®Т»ЎЈФЪҳO¶ЛМмҡвПВЈ¬ИЛ№ӨіэұщОЈлUРФёЯЈ¬ЗТіэұщР§№ыУРПЮЎЈ¶шІЙУГҷCЖчИЛіэұщҫЯУРР§ВКёЯЎўИЛҶTҹoӮыНцЎўҝЙЯBАm(xЁҙ)ЧчҳI(yЁЁ)өИғһ(yЁӯu)ьcЈ¬ҫЯУРҸV·әөД‘Ә(yЁ©ng)УГЗ°ҫ°ЎЈ®”(dЁЎng)З°Э”лҠҫҖВ·іэұщҷCЖчИЛөДЦчТӘСР°l(fЁЎ)ЛјВ·КЗФЪСІҫҖҷCЖчИЛөД»щөA(chЁі)ЙПФцјУіэұщДЈүKЈЫЈұЈЭЎЈө«УЙУЪіэұщҷCЖчИЛөД№ӨЧчӯh(huЁўn)ҫіК®·ЦҗәБУЈ¬Из№ыЦ»КЗәҶҶОөГК№УГСІҫҖҷCЖчИЛҝШЦЖЖчЈ¬ДЗК№Жд·Җ(wЁ§n)¶Ё№ӨЧчҫНҙжФЪәЬҙуА§лyЎЈұM№ЬҪьДкҒнёч·NЦЗДЬҝШЦЖ·Ҫ·ЁөДПаА^МбіцЈ¬ҢўҷCЖчИЛЦЗДЬҝШЦЖАнХ“іҜҢҚУГ»Ҝ·ҪПтУЦНЖЯMБЛТ»ІҪЈЫЈІӘІЈіЈЭЈ¬ө«ҫаНкИ«ҢҚлH‘Ә(yЁ©ng)УГТАИ»ҙжФЪТ»¶ЁөДІоҫаЎЈОД«IЈЫЈұЈЭЦРөДЯbІЩЧч·Ҫ·ЁҝШЦЖР§ВКөНЈ¬ЯhіМНЁРЕТЧКЬлҠҫW(wЁЈng)өДҸҠлҠҙЕёЙ”_ЎЈОД«IЈЫЈҙЈЭІЙУГөДЧФЦчРРһйҝШЦЖ·Ҫ°ёЈ¬УЙУЪОТҮшлҠҫW(wЁЈng)јЬҫҖІ»ТҺ(guЁ©)·¶Ј¬К№өГУЙК©№ӨКЦғФҪЁБўЖрҒнөДҝШЦЖ·Ҫ°ёФЪҢҚлH‘Ә(yЁ©ng)УГЦРИұ·ҰҝЙІЩЧчРФЎЈбҳҢҰЙПКцҶ–о}Ј¬ұҫОДМбіцБЛТ»·N»щУЪсR –ҝЙ·тӣQІЯЯ^іМәНРРһйҢW(xuЁҰ)Б•(xЁӘ)ҫW(wЁЈng)Ҫj(luЁ°)өДРРһйҝШЦЖЖчЎЈФ“ҝШЦЖЖчҪY(jiЁҰ)әПБЛЯbІЩЧчәНЧФЦчРРһйҝШЦЖөДғһ(yЁӯu)ьcЈ¬І»ө«МбёЯБЛҝШЦЖөДҝЙҝҝРФЈ¬ЯҖҪөөНБЛІЩЧчҶTөД№ӨЧчШ“(fЁҙ)“ъ(dЁЎn)ЎЈ
ПакP(guЁЎn)йҶЧx:
- ...ЎӨҲDОДФ”ҪвЖыЬҮғxұн°еұіәуөДЬҮТҺ(guЁ©)јү°ІИ«ФO(shЁЁ)УӢТӘЗу
- ...ЎӨК№УГУР°ІИ«ұЈХПөДйWҙжҙжғҰҳӢ(gЁ°u)ҪЁ°ІИ«өДЖыЬҮПөҪy(tЁҜng)
- ...ЎӨ·ҙПтЖ«ЦГІо·ЦҫҖРФӮчёРЖчөДЭ^РВЯMХ№әН‘Ә(yЁ©ng)УГ
- ...ЎӨ°¬өВҝЛЛ№ңyФuДіЖ·ЕЖЦЗДЬІеЧщЎӘЎӘҙэҷC№ҰәДЖӘ
- ...ЎӨИэҫҖлҠЧиКҪңШ¶ИҷzңyЖчңyБҝПөҪy(tЁҜng)ЦР„оҙЕлҠБчК§ЕдөДУ°н‘(Аm(xЁҙ))
- ...ЎӨИэҫҖлҠЧиКҪңШ¶ИҷzңyЖчңyБҝПөҪy(tЁҜng)ЦР„оҙЕлҠБчК§ЕдөДУ°н‘
- ...ЎӨRTDңyБҝПөҪy(tЁҜng)ЦР„оҙЕлҠБчК§ЕдөДУ°н‘
- ...ЎӨЛ{САBR/EDR әН Bluetooth SmartөДК®ҙуЦШТӘ…^(qЁұ)„e
- ...ЎӨIoTҫW(wЁЈng)кP(guЁЎn)ЖҪЕ_Еc‘Ә(yЁ©ng)УГ
- ...ЎӨФцҸҠ°жARM DesignStartЈәНЁПт¶ЁЦЖ»ҜSoCөДЭ^ҝмЎўЭ^өНпL(fЁҘng)лUЦ®В·
- ...ЎӨҢҚуwБгКЫЮD(zhuЁЈn)РНO2OЈ¬Ӯ}ғҰОпБчөДЦЗДЬ»ҜЛ®ЖҪҸДәОМбЙэЈҝ
- ...ЎӨҺЧ·NЬҮУГLEDтҢ(qЁұ)„У·Ҫ°ёөДұИЭ^
- ...ЎӨЛ{САЕдҢҰөЪ¶юЖӘЈәГЬиҖЙъіЙ·Ҫ·Ё
- ...ЎӨЦРлҠИрИAНЖіцоI(lЁ«ng)ПИөДҹoҫҖ”ө(shЁҙ)“ю(jЁҙ)ІЙјҜҪвӣQ·Ҫ°ё
- ...ЎӨ°ІЙӯГА°лҢ§(dЁЈo)уwЕдәПКРҲцЪ…„ЭөДҹoҫҖідлҠ·Ҫ°ё
- ...ЎӨ°ІЙӯГА°лҢ§(dЁЈo)уwЕдәПЖыЬҮХХГчФO(shЁЁ)УӢЪ…„ЭөДҪвӣQ·Ҫ°ё


- ...ЎӨ Ў°Рҫ„“(chuЁӨng)ұӯЎұКЧҢГёЯРЈОҙҒнЖыЬҮИЛҷCҪ»»ҘФO(shЁЁ)УӢҙуЩҗҲуГыХэКҪҶў„У
- ...ЎӨ МҪГШөЪ¶юҢГРl(wЁЁi)Л{ЙҪъ—Ў°„“(chuЁӨng)РВЎӨ№ІПнЎұФҮтһјјРg(shЁҙ)Х“үҜЈЎ
- ...ЎӨ Ў°2018ЦРҮш°лҢ§(dЁЈo)уwЙъ‘B(tЁӨi)жңҙу•юЎұФЪҪӯМKКЎнмнфЕeРР
- ...ЎӨ РВЦчо}РВТҺ(guЁ©)„қЈ¬CITE 2019ІtНыЦЗ»ЫОҙҒн
- ...ЎӨ ҸДЖыЬҮөҪ№ӨҸSЈ¬TIәБГЧІЁӮчёРЖчЦВБҰУЪ„“(chuЁӨng)ФмёьЦЗДЬөДКАҪз
- ...ЎӨ Тв·Ё°лҢ§(dЁЈo)уwЈЁSTЈ©ЎўCinemoәНValensФЪCES 2018Х№ЙПВ“(liЁўn)әПСЭКҫЖыЬҮРЕПўҠКҳ·ҪвӣQ·Ҫ°ё
- ...ЎӨ ұұҫ©јҜіЙлҠВ·®a(chЁЈn)ҳI(yЁЁ)„“(chuЁӨng)РВ°l(fЁЎ)Х№ёЯ·еХ“үҜјҙҢўФЪҫ©ХЩй_
- ...ЎӨ ИэБвлҠҷCҸҠ„Эіц“фPCIMҒҶЦЮ2017Х№
- ...ЎӨ GPGPUҮш®a(chЁЈn)МжҙъЈәЦРҮшРҫЖ¬®a(chЁЈn)ҳI(yЁЁ)өДҝХ°ЧөШҺ§
- ...ЎӨ ОпВ“(liЁўn)ҫW(wЁЈng)®a(chЁЈn)Ж·ФO(shЁЁ)УӢЦРWi-FiЯBҪУөДЛДӮҖкP(guЁЎn)жIТтЛШ
- ...ЎӨ өЪИэҢГЦРҮшMEMSЦЗДЬӮчёРЖч®a(chЁЈn)ҳI(yЁЁ)°l(fЁЎ)Х№ҙу•юјҙҢўУЪ°цІәАӯй_бЎД»
- ...ЎӨ IAICҢЈн—ЩҗСЭА[Ў°ЦРҮшРҫЎ°‘Ә(yЁ©ng)УГ„“(chuЁӨng)РВЈ¬РЕПў°ІИ«ёЯ·еХ“үҜББ„ҰәЈҢҺ
- ...ЎӨ ЦЗДЬҝШЦЖУРФҙгQО»·ҙјӨ
- ...ЎӨ ҪвЧx5GәБГЧІЁOTA ңyФҮјјРg(shЁҙ)
- ...ЎӨ ¶аӮҖКРҲцёЯЛЩФцйLНЖ„УMolexјУҸҠЖыЬҮоI(lЁ«ng)УтөД°l(fЁЎ)Х№
- ...ЎӨ ЦРҮшҫGЙ«ЦЖФмВ“(liЁўn)ГЛіЙБўҙу•юХЩй_ФЪјҙ Хю®a(chЁЈn)ҢW(xuЁҰ)СРУГ№ІМҪҫGЙ«°l(fЁЎ)Х№РВДЈКҪ
- ...ЎӨ Efinix® И«БҰтҢ(qЁұ)„УAIЯ…ҫүУӢЛгЈ¬іЙ№ҰНЖіцTrion™ T20 FPGAҳУЖ·, Н¬•rҢў®a(chЁЈn)Ж·”UХ№өҪ¶юК®ИfЯүЭӢҶОФӘөДT200 FPGA
- ...ЎӨ УўпwБиББПаЯMІ©•юЈ¬ТэоI(lЁ«ng)ЦЗ»ЫРВЙъ»о
- ...ЎӨ ИэлҠ®a(chЁЈn)Ж·й_°l(fЁЎ)ј°ңyФҮСРУ‘•юұұЖыРВДЬФҙҢЈҲціЙ№ҰЕeРР
- ...ЎӨ ManzҒҶЦЗҝЖјјҝзИл°лҢ§(dЁЈo)уwоI(lЁ«ng)Ут һйГж°ејүЙИіцРН·вСbМṩ»ҜҢW(xuЁҰ)қсЦЖіМЎўНҝІјј°јӨ№в‘Ә(yЁ©ng)УГөИЙъ®a(chЁЈn)ФO(shЁЁ)ӮдҪвӣQ·Ҫ°ё
- ...ЎӨ ЦРлҠИрИABITRODE„УБҰлҠіШңyФҮПөҪy(tЁҜng)нҳАыҪ»ё¶ұұЖыРВДЬФҙ
- ...ЎӨ ЦРлҠИрИAFTFПөБРлҠіШңyФҮПөҪy(tЁҜng)ЦРҳЛ(biЁЎo)ұұҫ©РВДЬФҙЖыЬҮ№Й·ЭУРПЮ№«Лҫ
- ...ЎӨ ЦРлҠИрИAҙу№ҰВКёЯүәДЬФҙ·ҙрҒКҪШ“(fЁҙ)ЭdПөҪy(tЁҜng)іЙ№ҰҪ»ё¶ЦРлҠРЬШҲ
- ...ЎӨ ЦРлҠИрИAҮшлHФЪлҠ„УЖыЬҮј°кP(guЁЎn)жIІҝјюңyФuСРУ‘•юЙПСЭА[ПИЯMңyФuјјРg(shЁҙ)


- ...ЎӨ ”ө(shЁҙ)“ю(jЁҙ)ІЙјҜҪK¶ЛПөҪy(tЁҜng)ФO(shЁЁ)Ӯд
- ...ЎӨ әҶғxҝЖјјМӨЙПРВХчіМ
- ...ЎӨ ТЧм`Лј® РыІј AEC-Q100 ЩYЩ|(zhЁ¬)ХJ(rЁЁn)ЧCәНЖыЬҮПөБР®a(chЁЈn)Ж·УӢ„қ
- ...ЎӨ ТЧм`Лј® РыІј”UідёЯРФДЬ вҒҪрПөБР™ FPGA ®a(chЁЈn)Ж· вҒҪрПөБР®a(chЁЈn)Ж·”UідЦБ°ьә¬ 1M ЯүЭӢҶОФӘөД FPGA
- ...ЎӨ ТЧм`Лј® РыІјTrion® Titanium ФЪЕ_·eлҠ (TSMC) 16ј{ГЧ№ӨЛҮ№қ(jiЁҰ)ьcБчЖ¬
- ...ЎӨ TIұӯ2019ДкИ«ҮшҙуҢW(xuЁҰ)ЙълҠЧУФO(shЁЁ)УӢёӮЩҗоCӘ„өд¶YФЪҫ©ЕeРР
- ...ЎӨ BlackBerry QNXМ“”MҷC«@өГИ«ЗтКЧӮҖЖыЬҮ°ІИ«НкХыРФөИјү(ASIL) Ў®DЎҜХJ(rЁЁn)ЧC
- ...ЎӨ НюсRЖыЬҮЯx“сBlackBerryЦъБҰПВТ»ҙъЖыЬҮ